
Produktai



siurbtuko stiklų tvarkymo pneumatinis manipuliatorius
Trumpas aprašymas:
Pneumatinis manipuliatorius, taip pat žinomas kaip manipuliatorius, pusiausvyros kranas, balanso stiprintuvas, rankinis apkrovos perkėlimo aparatas (aukščiau pateiktas teiginys nėra profesionalus, bet populiarus Kinijoje), yra naujas, naudojamas medžiagų tvarkymui ir montavimui bei darbo jėgos taupymui.

siurbtuko stiklą valdantis pneumatinis manipuliatorius taiko jėgos pusiausvyros principą, kad operatorius galėtų atitinkamai stumti ir traukti sunkų daiktą, o tai gali subalansuoti judančią padėtį erdvėje. Sunkus objektas keldamas arba nusileisdamas sudaro plūduriuojančią būseną, o ne veikimo jėgą garantuoja dujinis kelias (apdirbimo proceso ir projektavimo sąnaudų kontrolė, eksploatavimo jėga yra mažesnė nei 3 kg pagal sprendimo standartą) veikimo jėgą veikia ruošinio svoris. Be kvalifikuoto valdymo, operatorius gali ranka stumti ir traukti sunkų daiktą ir tinkamai pastatyti svorį į bet kurią vietą erdvėje.

apie mus

Esame profesionalus pritaikytos automatikos įrangos gamintojas. Mūsų gaminiai apima iškroviklį, paėmimo ir išdėstymo pakavimo mašiną, padėklų aparatą, robotų integravimo programą, pakrovimo ir iškrovimo manipuliatorius, kartono formavimą, kartono sandarinimą, padėklų dozatorių, vyniojimo mašiną ir kitus automatizavimo sprendimus, skirtus galinės pakavimo gamybos linijai.
Mūsų gamyklos plotas yra apie 3500 kvadratinių metrų. Pagrindinė techninė komanda turi vidutiniškai 5-10 metų patirtį mechaninio automatizavimo srityje, įskaitant 2 mechanikos projektavimo inžinierius. 1 programavimo inžinierius, 8 surinkėjai, 4 po pardavimo derinantys asmenys ir kiti 10 darbuotojų
Mūsų principas yra „pirmiausia klientas, pirmiausia kokybė, pirmiausia reputacija“, visada padedame savo klientams „padidinti gamybos pajėgumus, sumažinti išlaidas ir gerinti kokybę“, siekiame tapti geriausiu tiekėju mašinų automatizavimo pramonėje.
- 1. Struktūra: Visas pneumatinės galios manipuliatorius daugiausia sudarytas iš instaliacijos laikymo pagrindo ir armatūros.2. Montavimo pamatai skirstomi į: 1. stacionarų koloną 2. mobilųjį pagrindą 3. stacionarų lubų pakabą 4. lubų pakaba yra mobili
3. Armatūra: paprastai pritaikoma pagal užsakovo pateikto gabalo išvaizdos dydį.1. kablio tipas; 2. griebimo tipas; 3. užveržimo tipas; 4. vidinio pakilimo tipas; 5. lifto tipas; 6. sukibimo tipas; 7. rankenos posūkio transformacija (apvertimas 90° arba 180°) 0; 8. vakuuminė adsorbcija; 9. Vakuuminės adsorbcijos posūkio transformacija (apvertimas 90° arba 180°) ir kitos, specialiai parinktos ir sukurtos bei suprojektuotos, pasiekė gerą naudojimo efektą.
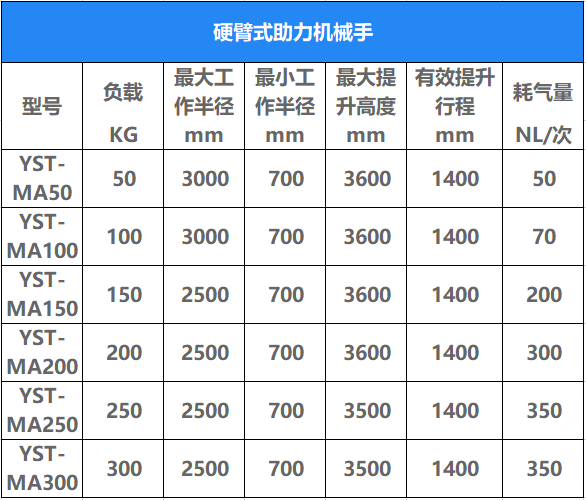
4. Pagrindinis blokas: daugiausia sudarytas iš subalansuoto cilindro ir standžios daugkartinio išjungimo konsolės, o pagrindiniai parametrai yra keliamoji galia ir aptarnavimo spindulys.
Produkto aprašymas
siurbimo puodelio stiklo tvarkymas Pneumatiniai manipuliatoriai buvo sukurti taip, kad veiktų su per kabantais kroviniais. Dėl šios priežasties jie yra būtini pramoninės įrangos pakrovimui ir iškrovimui. Pneumatinių priedų ir specialių priedų dėka galima ne tik pakelti detales, bet ir pasukti, pakreipti skruzdėlyną apversti aukštyn kojomis arba paprasčiau palenkti.
Produkto savybės
1. Visas pneumatinės galios manipuliatorius daugiausia sudarytas iš instaliacijos laikymo pagrindo ir armatūros.
2. Montavimo pamatai skirstomi į: 1. stacionarų koloną 2. mobilųjį pagrindą 3. stacionarų lubų pakabą 4. lubų pakaba yra mobili
3. Armatūra: paprastai pritaikoma pagal užsakovo pateikto gabalo išvaizdos dydį.1. kablio tipas; 2. griebimo tipas; 3. užveržimo tipas; 4. vidinio pakilimo tipas; 5. lifto tipas; 6. sukibimo tipas; 7. rankenos posūkio transformacija (apvertimas 90° arba 180°) 0; 8. vakuuminė adsorbcija; 9. Vakuuminės adsorbcijos posūkio transformacija (apvertimas 90° arba 180°) ir kitos, specialiai parinktos ir sukurtos bei suprojektuotos, pasiekė gerą naudojimo efektą.
4. Pagrindinis blokas: daugiausia sudarytas iš subalansuoto cilindro ir standžios daugkartinio išjungimo konsolės, o pagrindiniai parametrai yra keliamoji galia ir aptarnavimo spindulys.







